Principe du moteur pas à pas¶
Description d'un moteur pas à pas¶
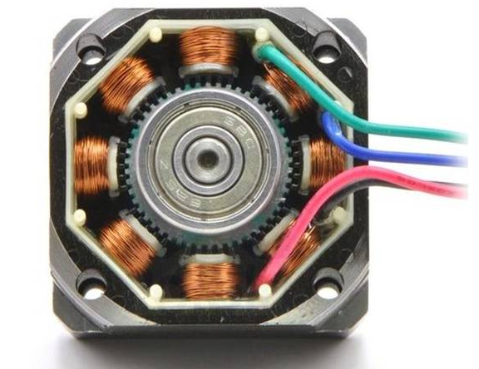
Si on ouvre un moteur pas à pas (de type bipolaire pour être précis, car il y en a d'autres), on verra qu'il est constitué :
- d'un rotor magnétique cranté en périphérie
- de bobines avec 4 fils qui sortent
D'un point de vue électrique, un moteur pas à pas est l'équivalent de 2 bobines, que l'on appelle phases : chaque bobine ayant 2 fils, c'est pour cela que l'on a 4 fils en sortie du moteur.

Le principe d'un moteur pas à pas¶

Le principe général du moteur pas à pas, c'est qu'il tourne par "crans" successifs, que l'on appelle pas. Au final, un moteur pas à pas tourne comme une trotteuse de montre à aiguille, enchaînant position après position. Par contre, évidemment, cet enchaînement est suffisamment rapide pour qu'on ne s'en rende pas compte.
Info
La rotation du moteur va ainsi pouvoir être contrôlée au "pas près", ce qui explique sa précision et c'est la raison pour laquelle on l'utilise sur les machines numériques.
Ce qu'il faut retenir, et c'est important, c'est le moteur pas à pas est défini par son nombre de pas "physiques", autrement dit le nombre de crans nécessaires pour faire un tour. Typiquement, sur nos machines, les moteurs utilisés sont des moteurs en 200 pas physiques ou "natifs".
La précision du pas est alors de 360° (1 tour) / 200 pas = 1.8°. Les pas natifs sont représentés ci-contre en rouge (il n'y en n'a pas 200, c'est juste pour comprendre le principe).
Tester le par vous-mêmes !

Une façon simple de s'en rendre compte, c'est de prendre en main un moteur pas à pas, de pincer l'axe entre ses doigts et de le faire tourner manuellement : vous sentirez les "crans" ou pas du moteurs. Important : il ne faut pas que les câbles se touchent pour que l'axe tourne librement.
Le mode microstep¶
Principe général¶

Grâce à l'électronique des étages de contrôle des moteurs, le génie humain a trouvé le moyen de créer des pas intermédiaires en jouant sur l'intensité des phases (on explique çà séparément dans des tutos dédiés si çà vous intéresse, mais ici, on vous donne l'essentiel utile pour comprendre).
Le principe général à retenir, c'est que le mode micropas correspond à l'ajout de pas intermédiaire entre les pas natifs !
Par convention, j'appelle les pas ainsi ainsi créé des micropas à distinguer des pas physiques natifs.
Sur le schéma ci-contre, on a symbolisé les pas natifs en rouge et les micro-pas en bleu.
Ce qui est génial en fait !
On a dit précédemment que le moteur pas à pas est contrôlable au "pas près"... et bien ici, ce qui est génial, c'est que le moteur va être contrôlable au "micro-pas près" ! Bluffant en fait et c'est çà l'un des secrets de la précision obtenue avec les machines numériques.
Savoir calculer le nombre de micropas¶
Nombre de micropas par pas physique¶
Logiquement, le nombre de micropas créé est exprimé sous forme du ratio de division utilisé :
- en l'absence de micropas, la division est de 1:1 et chaque pas est le pas natif. C'est le mode appelé "full step"
- lorsque la division est de 1:2, chaque pas physique est divisé en 2 micropas. C'est le mode "half step"
- lorsque la division est de 1:4, chaque pas physique est divisé en 4 micropas. C'est le mode "quarter step"
- lorsque la division est de 1:16, chaque pas physique est divisé en 16 micropas. C'est ce réglage qui sera utilisé sur la machine.
Je retiens !

Bien retenir le principe général : lorsque la division est de 1:n, chaque pas physique est divisé en n micropas.
Par exemple, si le micropas est réglé en 1:16, alors chaque pas est divisé en 16 micropas... et le nombre de pas natifs multiplié par 16 !
Nombre de micropas par tour¶
Si on contrôle un moteur pas à pas de 200 pas par tour en mode 1/16, il y a donc 16 micropas par pas physique ce qui donne un total de 200 x 16 = 3200 micropas par tour.
Précision angulaire théorique en mode micropas¶
On peut dès lors calculer également la précision angulaire théorique qui est augmentée d'un facteur n si le mode de micropas est 1:n.
Par exemple, pour un moteur de 200 pas natifs pour lequel on a 1.8°/pas, en 1/16 de pas, la précision devient : 360° / (200x16) = 360°/3200 micropas = 0,1125° / pas !
Intérêt et limites du micropas ?

L'objectif essentiel de l'ajout des pas est d'augmenter la précision.
Par contre, logiquement, à vitesse égale, le moteur en mode micropas va tourner moins vite à fréquence de pas égale ou pour dire les choses autrement, on devra augmenter la fréquence des pas pour garder la même vitesse. Il en résulte la nécessité de disposer d'une électronique capable de générer le micropas utilisé.
Ceci étant cela a un impact sur le couple moteur qui est réduit partiellement, tout se passant comme si l'onde électrique du moteur était transformée d'une onde carrée en une onde sinusoïdale. La différence d'aire entre les 2 correspond à la différence de couple du moteur.
Enfin, arrive un moment où la précision théorique du micropas arrive dans la marge d'erreur de positionnement du moteur pas à pas. En conséquence, aller au-delà n'a pas grand intérêt.
En pratique, retenir qu'au-delà d'un mode micropas de l'ordre de 1/16 ou 1/32, on n'aura pas de gain supplémentaire de précision, mais on aura de la perte de couple supplémentaire et diminution de la vitesse à fréquence égale des pas. En clair, çà ne sert à rien de pousser le micropas au maximum, dépassé une certaine limite.